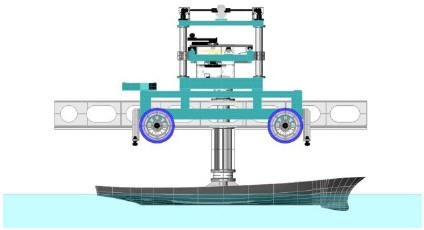
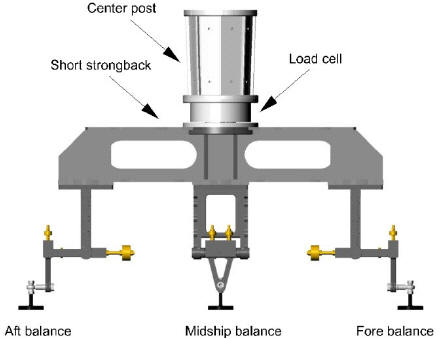
Fix-mount constrains the model in all motions
Model is assembled rigidly with the fix-mount and then ballasted:
to the static waterline position (FX0: fixed even-keel condition)
to the dynamic sinkage (σ = 0.192 x 10-2 L) and trim (τ = -0.136˚; bow down) corresponding to Fr = 0.280 (FXστ: fixed sunk and trimmed condition)
| Fix-mount | Fixed-model |
|
|
|
![]()
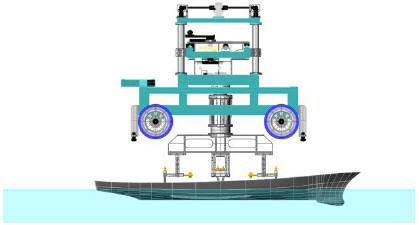
Free-mount allows the model to move freely in heave, pitch, and/or roll motions.
Model is connected to the free-mount with two types of joints using roller or spherical bearings.
The roller bearing prevents and the spherical bearing allows the roll motion, respectively, while transmitting the heave and pitch motions of the model.
Model is first ballasted to the static waterline and then connected to the free mount:
using the roller joint (FRzθ; free to heave and pitch condition)
using the spherical joint (FRzθf; free to heave, pitch, and roll condition)
| Free-mount | Free-model |
 |
 |
![]()
Define:
 (ratio to FX0)
(ratio to FX0)
and
 (ratio to FRzθ)
(ratio to FRzθ)
where, x0, xστ, xzθ, and xzθf can be any quantity from the FX0, FXστ, FRzθ, and FRzθf conditions, respectively.
![]()

Compared to FX0 condition:
The effect of fixed sinkage and trim (ξστ) is relatively small, about 3 ~ 7% increase of forces and moment.
The effect of free heave and pitch motions (ξzθ) is relatively large, up to 33% increase of forces and moment. In general ξzθ value increase with Fr and β.
The effect of roll motion (ζf, i.e. ξzθ/ξzθf) is small, within 2 ~ 3% differences in forces and moment between the roll-fixed (FRzθ) and -free (FRzθf) conditions.
![]()
Compared to FX0 condition:
The effect of fixed sinkage and trim (ξστ) is fairly small; about +10% change in the dominant harmonic amplitudes.
The effect of free heave and pitch motions (ξzθ) is relatively large, up to 25% increase of the dominant harmonic amplitudes of forces and moment.
The effect of roll motion (ζf, i.e. ξzθ/ξzθf) is small, about +1% difference of the dominant harmonic amplitudes between the roll-fixed (FRzθ) and -free (FRzθf) conditions.
The effecte of heave, pitch, and roll motions on the phase angle of the dominant harmonic (φY1 and φN1) are very small, typically within +2%.
![]()
Compared to FRzθ condition:
Linear (velocity) derivatives values from FX0, FXστ, and FRzθf mount conditions are fairly similar, with differences within +10%.
Non-linear, acceleration, and cross-coupled derivatives from the fix-mount conditions (FX0 and FXστ) values are usually smaller.
Non-linear derivatives values for the roll-free condition (FRzθf) do not show a clear trend.
Acceleration and cross-coupled derivatives values for the roll-free condition (FRzθf) are fairly similar.
![]()