Design and construction of the PMM is a collaborative effort by Sanshin Seisakusho Ltd. and Mori Engineering Ltd. for the mechanical and electrical systems, respectively.
A four-wheel carriage supports the main PMM mechanical system which is towed behind the IIHR drive carriage.
Long (4 m) and short (1.5 m) strongbacks are attached to the yaw platter for fixed and free mount conditions, respectively. Each strongback is pre-settable at drift angles b between ±30° for static drift or combined yaw and drift tests.
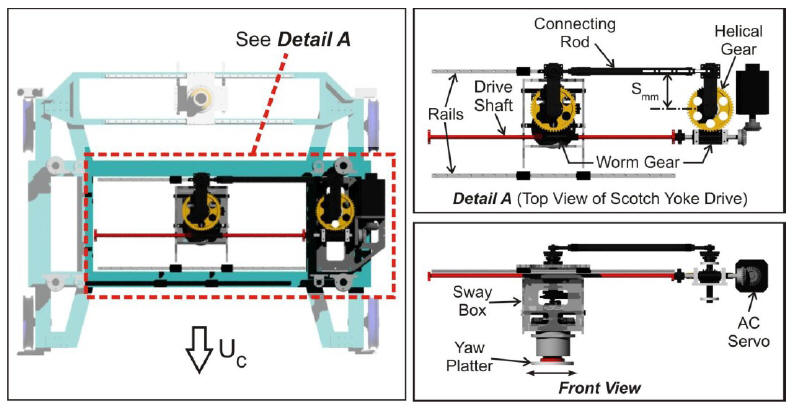
The mechanical system is a scotch-yoke type which converts rotational motion of an 11 kW AC servo motor to linear sway motion of a sway box and angular yaw motion of a yaw platter beneath the sway box.
The scotch yoke is driven through a control rack, PC, and software up to 0.25 Hz with maximum sway and yaw amplitudes of ±500 mm and ±30°, respectively.
Factory calibrated linear and rotational potentiometers are installed on the carriage to monitor and report the sway and yaw position of the sway box and yaw platter, respectively.
Static calibrations of the linear potentiometers are conducted periodically to check their output.
![]()
![]()
![]()