THIS IMAGE GALLERY WAS GENERATED BY THE
CAD/Robotics GROUP
AT THE UNIVERSITY OF IOWA

THIS IMAGE GALLERY WAS GENERATED BY THE CAD/Robotics GROUP AT THE UNIVERSITY OF IOWA |
||
|
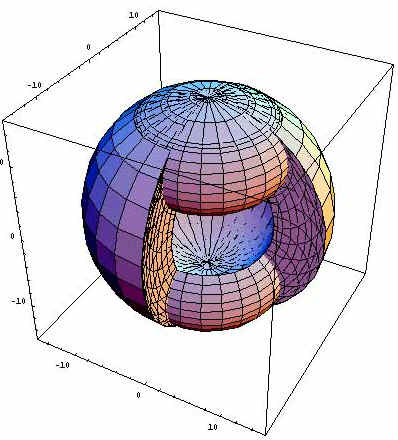
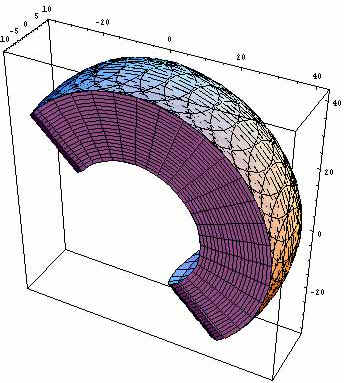
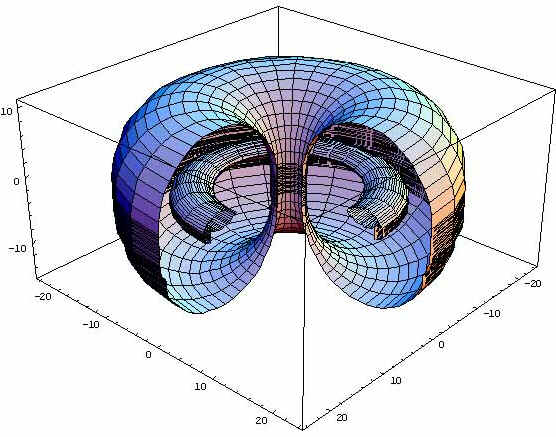
This volume characterizes the workspace of a 3DOF
robot arm shown below.
|
|
|
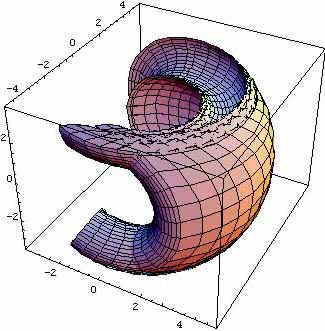
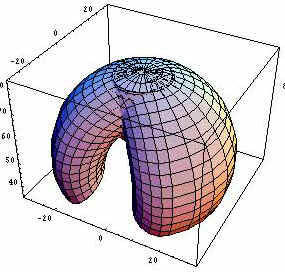
This the swept volume of an arc revolved twice in space about arbitrary axes. | |
|
This the material removed from a workpiece using a 5-axis NC. This process is called machining verification. | |
|
General sweeping of an arc about 4 arbitrary axes. | |
|
A simple sweep of a cylindrical surface in space about one axis in space. | |
|
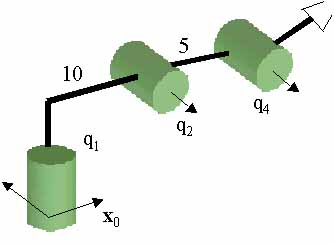
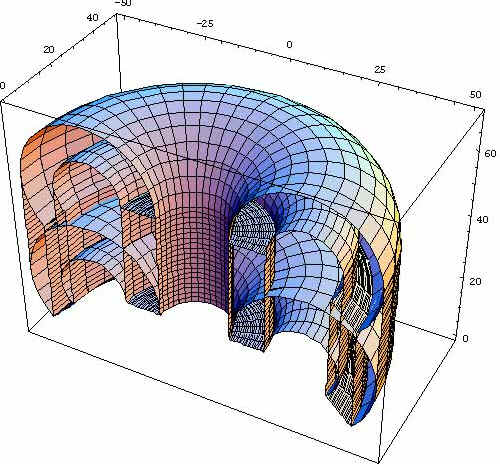
Workspace of a 4DOF robot arm with two revolute and two prismatic joints. | |
|
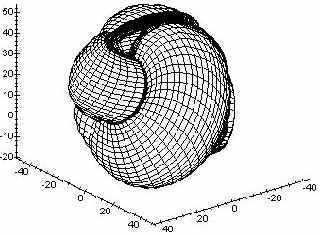
Workspace of a 4-Revolute robot arm. | |
|
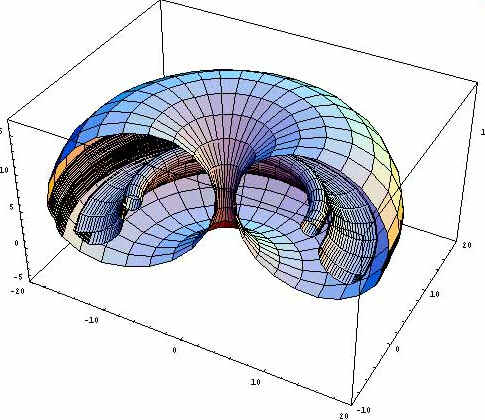
Identifying voids in the workspace (swept volume). | |
|
Identifying voids in the workspace (swept volume). |