Return to Main
Return to Research
Return to Main |
Return to Research |
Robotics Research
K.
Abdel-Malek, Department of Mechanical Engineering
H.J. Yeh, Microtek International, Inc., Taiwan
A. Hager, Qualicoat, Inc., NY
L. Adhami, Ecole Superieure en Sciences
Informatiques, Sophia-Antipolis, France
J. Yang, PhD program at the University of Iowa
Research in the
following areas:
1. Off-Line Simulation and Programming
2. Kinematics and Workspace analysis
3. Design of Robot Manipulators
4. Dexterity and Placement of robot manipulators
See our Publications List by Topic
![]()
1.
Off-Line Simulation and Programming (Based on US Patent
5,511,147)
In a manufacturing environment consisti ng of a multiple
of cells, cell-setup time is often the most costly aspect.
Robotic manipulator arms have been used in the past increase
productivity. Although in many cases, manipulators have reduced
setup times, they do require sophisticated program m ing.
Particularly when the tasks cannot be taught using a teaching
device (e.g. teach pendant). The Objective of the
three-dimensional computer-aided robotics interface (called
3D-CAI) is to provide the robot programmer with a simple
tool to program complex ro b otic functions through interactive
CAD techniques. Representations of the external environment is
constructed using solid modeling techniques. Manipulation of
solids using boolean operators is performed to represent complex
objects. The configuration ( p osition and orientation) of a
triad can be modified by the user. 3D-CAI
provides an off-line programming method where logic, repetitive
tasks, and sensory control can be programmed interactively.
Trajectories are planned by manipulating three-dimensiona l
curves on the screen. Icons are used to represent end-effector
configurations of the manipulator. Linking icons via
three-dimensional curves mandates the motion of the manipulator
arm. The introduction of a graphical environment reduces the task
of vi s ualizing points, orientations, and trajectories rendering
the environment simple to use for non-robotics experts. Two
implementations of this environment are discussed: an
implementation into a sheet-metal manufacturing
cell to reduce setup times, and an implementation into a
workstation for aiding disabled individuals to feed themselfs
through a voice recognition system. Difficulties encountered in
those implementations are discussed. This work is based on US
patent (Abdel-Malek 1995). Subsequent work
included methods for checking and avoiding collisions.
Liu, J.F. and
Abdel-Malek, K., (in press), "Robust Control of
Planar Dual-Arm Cooperative Manipulators", Robotics
and Computer-Integrated Manufacturing
2.
Kinematics and Workspace Analyses
Rigorous mathematical formulations for modeling
and analyzing serial robot manipulators have been
created. Using these formulations, we are able to obtain
closed form solutions of the workspace including barriers
inside the workspace where the manipulator exhibits
control difficulties. Because of this novel approach, we
are able to address issues that were only addressed using
numerical techniques. We have also been able to
demonstrate the workspace envelope (and voids) for many
manipulators. For example, the figures below show the
workspace and internal surfaces (also called in the
literature as singular surfaces).
SEE ALSO A RELATED SITE: THE SWEPT VOLUME COMMUNITY
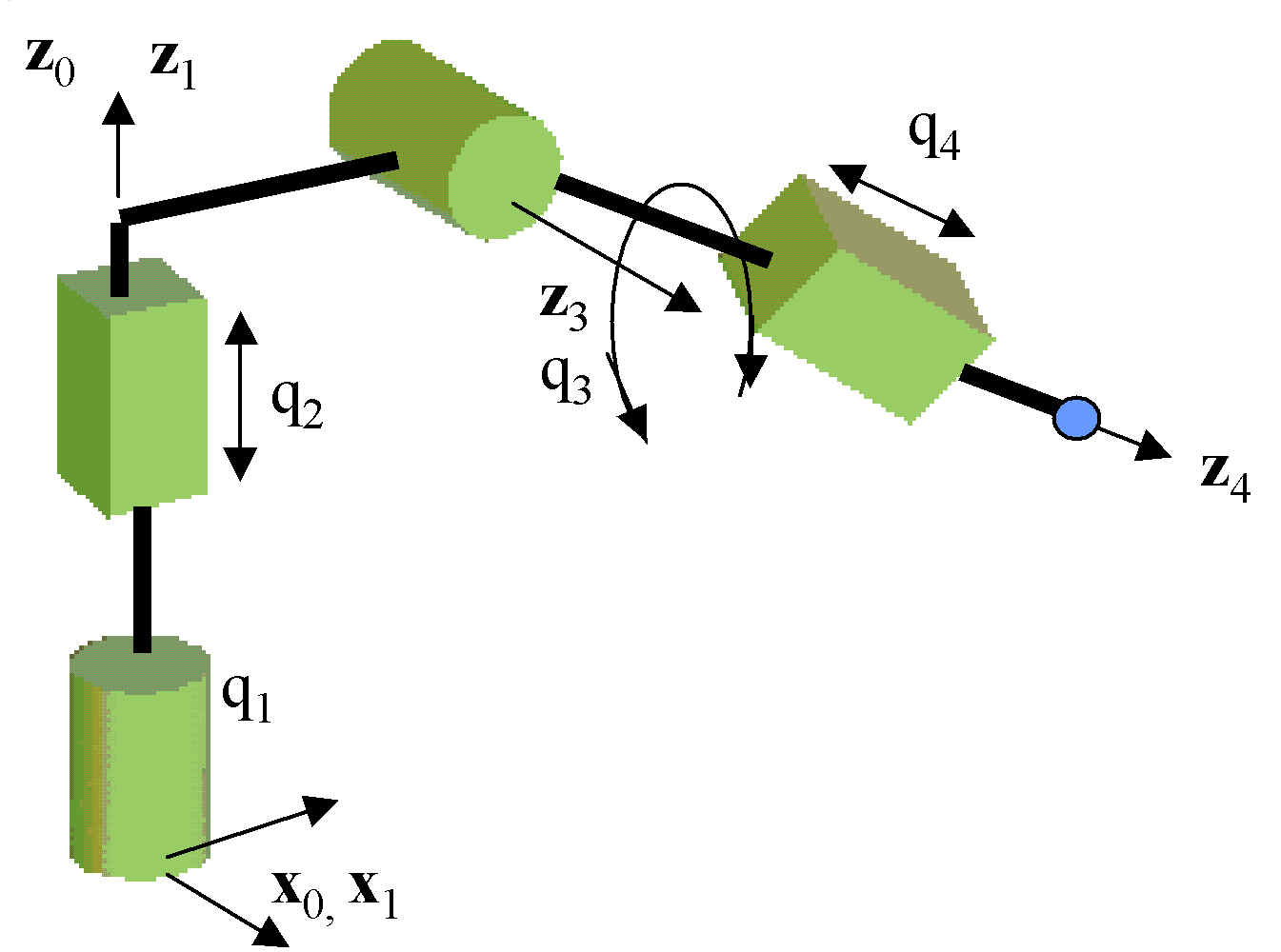
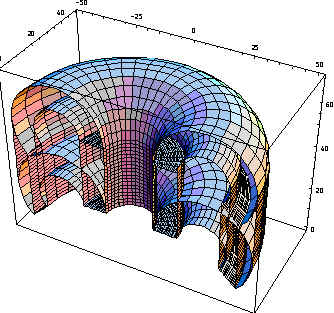
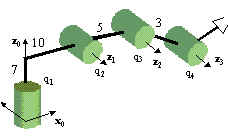
Figure 1 A 4R manipulator Fig. 2 The workspace depicting all singular surfaces
Extension of this work has been implemented to
4.
Dexterity and Placement of Robotics Manipulators
Criteria and implementation for the placement robot
manipulat ors with the objective to reach specified target points
are herein addressed. Placement of a serial manipulator in a
working environment is characterized by defining the position and
orientation of the manipulator\rquote s base with respect to a
fixed reference f rame. The problem has become of importance in
both the medical and manufacturing fields, where a robot arm must
be appropriately placed with respect to targets that cannot be
moved. A broadly applicable numerical formulation is presented.
While other met h ods have used inverse kinematics solutions in
their formulation for defining a locality for the manipulator
base, this type of solution is difficult to implement because of
the inherent complexities in determining al inverse kinematic
solutions. The appro a ch taken in this work is based on
characterizing the placement forcing a cost function to impel the
workspace envelope in terms of surface patches towards the target
points and subject to functionality constraints, but that does
not require the computatio n of inverse kinematics. The
formulation and experimental code are demonstrated using a number
of examples.
Abdel-Malek, K. and Yeh, H. J., (2000) "Local Dexterity Analysis for Open Kinematic Chains," Mechanism and Machine Theory, Vol. 35, pp. 131-154.
Abdel-Malek, K.,
(1996), "Criteria for the Locality of a Manipulator
Arm with Respect to an Operating Point,"IMEChE
Journal of Engineering Manufacture, Vol. 210 (1),
pp. 385-394.