Return to Main
Return to Research
Return to Main |
Return to Research |
Workspace of Human Limbs
Forearm Workspace
Consider the forearm modeled as a 4-DOF
system, where the spherical joint at the shoulder is modeled as
three intersecting revolute joints and the elbow as a revolute
joint. This is consistent with published results except that we
have not considered the wrist joint (which is an additional 3
revolute joints) as fixed and we have limited the motion of the
shoulder to rotational. It should be noted that the most
difficult and the least successful modeling of a major
articulating joint has been the shoulder complex because of the
lack of appropriate biomechanical data as well as the anatomical
complexity of the region. Fig. 1a depicts the joint motions to be
modeled where each joint is given an independent coordinate ![]() and Fig. 1b depicts
the equivalent kinematic skeleton of the system where z-axes have
been located per the D-H representation method.
and Fig. 1b depicts
the equivalent kinematic skeleton of the system where z-axes have
been located per the D-H representation method.
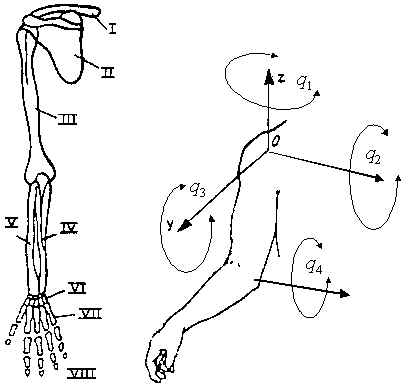
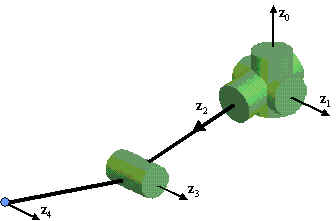
Fig. 1 (a) A schematic of the forearm (b) Kinematic modeling of the forearm as a spherical joint and a revolute joint
For an adult male, typical joint ranges
are measured as follows: ![]() ,
, ![]() ,
, ![]() , and
, and ![]() .
.
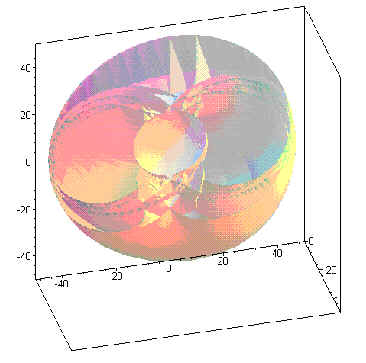
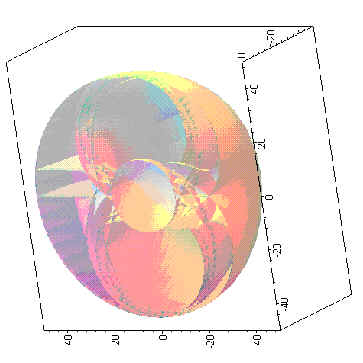
Fig. 2 Two cross-sectional views of the workspace of the forearm
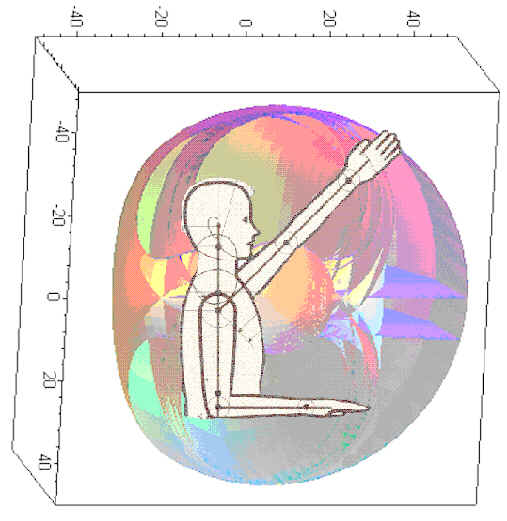
Fig. 3 Depicting the workspace and barriers with respect to the torso
Finger Workspace
Consider the workspace of a point
located at the tip of the index finger as shown in Fig. 5a. The
kinematic motion of the finger is modeled as four revolute
joints, two of which intersect and shown in Fig. 5b. Limits for
the finger joints are as follows: ![]() ,
, ![]() ,
, ![]() ,
and
,
and ![]() . The complete
workspace (every point touched by P) is shown in Fig. 6.
. The complete
workspace (every point touched by P) is shown in Fig. 6.
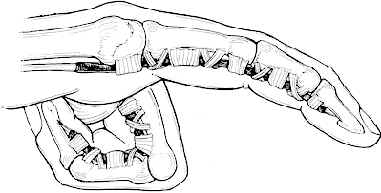
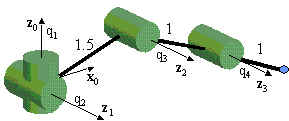
Fig. 4 (a) A schematic of a finger (b) Kinematic modeling of the finger as four revolute joints
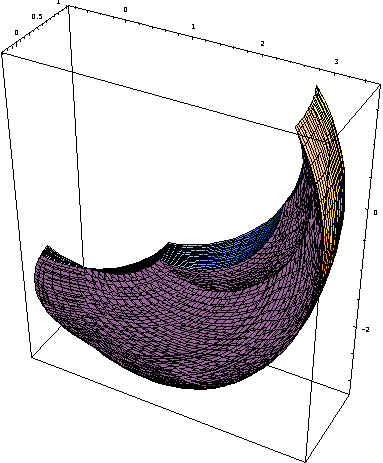
Fig. 5 Workspace of the finger